valereo
-
Gesamte Inhalte
12 -
Benutzer seit
-
Letzter Besuch
Leistung von valereo
-
FIS auf Basis Arduino Mega - Projekt erfolgreich abgeschlossen
valereo antwortete auf valereo's Thema in Ausstattungen & Umbauten
Moin, Einen Großteil des Codes habe ich von Alexander Grau übernommen. Siehe readme-File. Bei www.blafusel.de ist das Protokoll sehr gut beschrieben. Ist auch in der readme Datei verlinkt. Gruß, Andreas -
FIS auf Basis Arduino Mega - Projekt erfolgreich abgeschlossen
valereo antwortete auf valereo's Thema in Ausstattungen & Umbauten
Hallo zusammen, das Interesse ist wirklich deutlich gestiegen, nachdem ich nun kein A2 Fahrer mehr bin. Wird doch hoffentlich nicht daran liegen ;-). Ich stelle die Infos gern fürs Wiki zur Verfügung. Die Infos, die ich bisher auf Einzelanfragen gesendet hab gibt es jetzt hier für alle. Viel Spaß beim Nachbauen und natürlich Erweitern, ... und bitte nicht zu viel Kritik am Quellcode. Bin kein Software-Entwickler. Andreas 2021-03-04_AS_FIS_Audi_A2_Schaltplan.pdf arduino_kw1281_TFT_ucglib_Mrz2021.ino ASBitmaps.h NewSoftwareSerial.cpp NewSoftwareSerial.h Readme Audi A2 FIS.txt
-
FIS auf Basis Arduino Mega - Projekt erfolgreich abgeschlossen
valereo antwortete auf valereo's Thema in Ausstattungen & Umbauten
Hallo Patrick, ich habe Dir eine PN gesendet. Viele Grüße, Andreas -
FIS auf Basis Arduino Mega - Projekt erfolgreich abgeschlossen
valereo antwortete auf valereo's Thema in Ausstattungen & Umbauten
Hallo A2-Nerd. Die Sachen kann man von mir bekommen. Ich habe dir eine PN gesendet. Gruß, Andreas -
FIS auf Basis Arduino Mega - Projekt erfolgreich abgeschlossen
valereo antwortete auf valereo's Thema in Ausstattungen & Umbauten
Hallo zusammen, der eingangs beschriebene Audi A2 mit dem Spezial FIS steht nun zum Verkauf. Bin nur noch auf zwei Rädern unterwegs. Zum rumstehen ist er zu Schade. Siehe Basar hier im Forum oder hier: https://www.kleinanzeigen.de/s-anzeige/audi-a2-1-4-benzin-2001-128tkm-top-zustand-spezial-fis-tempomat/2536335161-216-7791 Viele Grüße, Andreas
-
FIS auf Basis Arduino Mega - Projekt erfolgreich abgeschlossen
valereo antwortete auf valereo's Thema in Ausstattungen & Umbauten
Hallo A2 HL jense, im Gegensatz zum Projekt "Kleines FIS ganz groß" habe ich nur Bauteile verwendet, die jeder kaufen kann, keine extra Platine herstellen lassen oder ähnliches. Den Quellcode bekommt jeder der damit arbeiten möchte und natürlich helfe ich jedem, der so ein Projekt umsetzen möchte. Hier mal eine Übersicht der Bauteile die ich verwendet habe: 1. Arduino Mega (Nachbau): 15 € 2. 1,77" TFT (Makershop): ca. 8€ 3. K409 USB Autodia OBD2 Interface: ca. 15 € 4. Einstellbarer Spannungsregler auf Basis LM317: ca. 5 € 5. Y-Kabel OBD2: ca. 10€ 6. Original OBD2 Buchse inkl. Kontakten: ca. 10€ 7. 2 x Schalter ca. 5 € 8. Micro-USB Einbaubuchse: 5-10€ 9. Kabel: ca. 5 € 10. Kunststoff Grundplatte für Montage: ca. 5 € In der Summe also unter 100€ für die Teile. Das K409 muss umgebaut werden, das hat mich etwas gebremst, da in meinem Interface wieder andere Bausteine verbaut waren als in diversen Anleitungen im Netz. Wenn man aber versteht, dass es eigentlich nur um einen Pegelwandler geht den man da benötigt, dann benötigt man nur eine gute Lupe, ein scharfes Skalpell, eine ruhige Hand und ein wenig Geschick beim Löten. Einen FIS Hebel hatte ich auch schon, aber leider habe ich kurz vor dem Projekt einen Tempomat nachgerüstet und dann irgendwie keine Lust mehr das Lenkrad und alles noch einmal abzuschrauben. Der Quellcode beinhaltet aber grundsätzlich auch schon eine "zweite Ebene" der Anzeige, da ich im Quellcode schon die Kommunikation mit dem KI und dem Motorsteuergerät umgesetzt habe. Wie bereits beschrieben bin ich davon überzeugt, dass man sich das Leben sehr viel leichter machen kann und auch mit deutlich weniger Geld auskommt, wenn man das Ganze über den CAN BUS und nicht über die K Line umsetzt. Den CAN BUS habe ich auch schon angezapft, es fehlt allerdings noch das Wissen über die IDs und die entsprechenden Daten, die man über die K Line dank guter Doku im Internet sehr gut kennt. Ich würde mich daher freuen, wenn alle Interessierten mithelfen die Infos zu den CAN BUS IDs zu sammeln und dann sind es nur wenige Bauteile: µController, z.B. Arduino Mega, TFT und CAN BUS Shield. Also, Freiwillige vor. Jeder der mein Projekt nachbauen will ist herzlich eingeladen mir zu schreiben. Ich halte keine Infos zurück und helfe wo es geht. Machen muss man aber selbst, da es nicht nur ein Plug & Play Projekt ist. Viele Grüße, Andreas -
FIS auf Basis Arduino Mega - Projekt erfolgreich abgeschlossen
valereo antwortete auf valereo's Thema in Ausstattungen & Umbauten
Hallo A4Fan, mein A2 hat keinen Komfortblinker. Gruß, Andreas -
FIS auf Basis Arduino Mega - Projekt erfolgreich abgeschlossen
valereo antwortete auf valereo's Thema in Ausstattungen & Umbauten
Hallo zusammen, Nur ein kurzes Feedback von mir, da ich gerade für ein paar Tage mit dem Fahrrad unterwegs bin und die Chefin sonst Stress macht ;-) @A4Fan: Danke. Ich habe mich wohl etwas unverständlich ausgedrückt. Auch ich führe die Initialisierung nur einmal zum Start (Zündungsplus) durch. Danach werden die Daten permanent in den Loops abgefragt. Daher erfolgt das Klicken auch nur einmal. Die Delays haben mehrere Gründe. Zum einen ist das TFT nicht sehr schnell. Daher braucht es zum Start etwas Zeit für den Startbildschirm. Fand ich aber ganz nett. Auch wenn die Grafik unheimlich viel Speicherplatz schluckt. Zum anderen frage ich in jeder Loop alle Daten aus den Messwertblöcken ab und diese Kommunikation mit Frage - Antwort- Spiel dauert halt. Auf dem TFT werden nur Daten neu geschrieben, die sich geändert haben. Das spart schon mal Zeit. Insgesamt stört mich der Delay nicht. Es handelt sich ja nicht um extrem dynamische Daten. Meine Tachoabweichung ist sehr gering, ca. 2 km/h bei 80 und 3 bei 100. Ich muss dazu aber sagen, dass ich mir beim Einbau der Tachonadeln sehr viel Zeit genommen habe und mit der Stellglieddiagnose ( 3000 1/min, 100 km/h, 50% Tankinhalt und 90°C Kühlwasser) die Nadeln penibel justiert habe. Ich vermute daher, dass die Tachoabweichung bei dir eher auf der Mechanikseite, d.h. bei der Tachonadel zu suchen ist. Bei mir passt die Geschwindigkeit aus dem KI auch gut mit GPS Daten überein. @Frickler Ich werde mich nach der Fahrradtour mal mit Github beschäftigen. Bisher habe ich das nur zum Download genutzt. Danke für die Idee. Ich werde aber vor der Veröffentlichung noch ein wenig den Code aufräumen und kommentieren. Viele Grüße, Andreas -
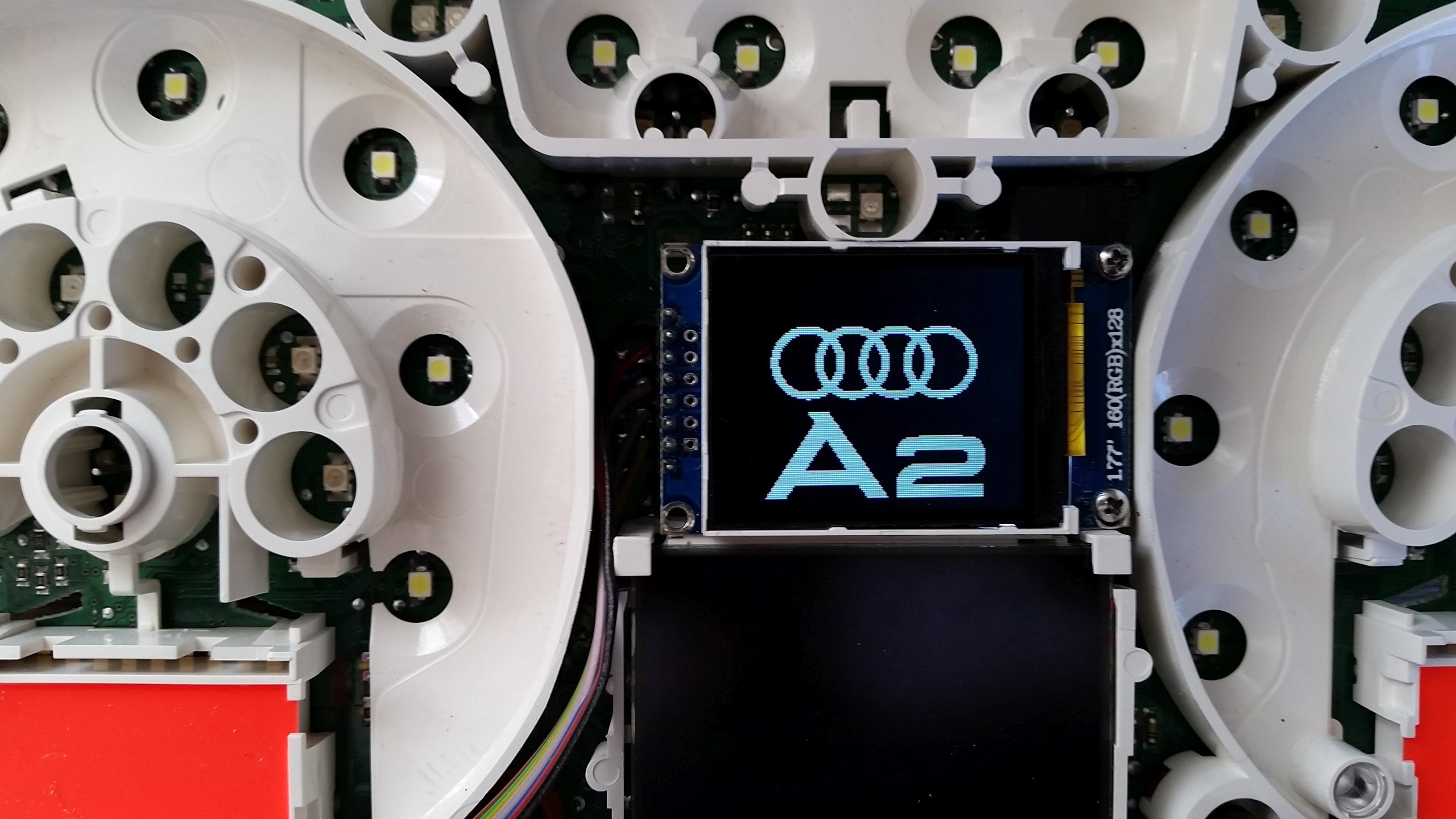
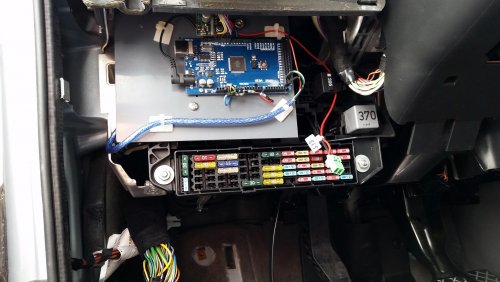
Hallo zusammen, seitdem ich im Dezember 2017 dem A2-Fieber verfallen bin und immer wieder spannende Projekte hier im Forum verfolgt habe, bin ich nun endlich in diesem Jahr dazu gekommen, ein eigenes Projekt umzusetzen. Ich wollte endlich – wie schon viele von euch vor mir – den ungenutzten Freiraum im Tacho (kleines FIS) nutzen und ein paar Zusatzinformationen darstellen. Leider war das Projekt „kleines FIS ganz groß“ hier schon vor einigen Jahren beendet worden. Aber das Projekt hat mich inspiriert etwas Eigenes zu verwirklichen. Da ich schon einige kleine Projekte auf Arduino-Basis umgesetzt habe, bildet auch dieses Mal ein Arduino (Mega) die Basis. Seit Mai 2020 verfügt mein A2 nun über eine zusätzliche Anzeige im Kombiinstrument. Die Daten werden über das KW1281 Protokoll direkt vom Steuergerät des Kombiinstrumentes abgerufen. Dieser Weg ist nicht der schnellste, aber die Idee den CAN Bus zu nutzen kam erst während der Realisierung und da fehlt es noch etwas an reverse engineering um die erforderlichen Informationen aus dem Datenstrom zu extrahieren. Evtl. wird das mal ein Folgeprojekt. Hier nun die Details: Prozessor: Arduino Mega Display: TFT 160x128 1,77“ Schnittstelle: modifiziertes USB OBD KKL Interface Dargestellte Messwerte: Batteriespannung Außentemperatur (ungedämpft) Geschwindigkeit Ganganzeige Kühlwassertemperatur Öltemperatur Tankinhalt Bis auf die Messerte 1, 4 und 7 stammen die Daten direkt aus dem Steuergerät des Kombiinstruments. Die Batteriespannung wird direkt über einen Spannungsteiler und einen Analogeingang des Arduino Mega ermittelt. Die Ganganzeige wird errechnet aus Drehzahl (nicht angezeigt) und Geschwindigkeit. Dazu habe ich die Gesamtübersetzungen verwendet. Beim Tankinhalt musste ich eine gleitende Mittelwertbildung (Tiefpass) programmieren, da sonst jede Kurve zu einem fröhlichen Auf und Ab der Messwerte führte. Die Daten im Steuergerät sind offensichtlich nicht gedämpft. Zusätzlich zur permanenten Anzeige gibt es einen Startbildschirm ( A2), der bei Start des Prozessors (über Zündungsplus) erscheint, bis die Kommunikation mit dem Steuergerät hergestellt ist. Es gibt einen Hauptschalter und eine Micro-USB Schnittstelle, über die z.B. eine neue Firmwareversion auf den Arduino Mega geflasht werden kann. Spannungsversorgung des Arduino erfolgt über einen Spannungsregler, der als Eingang abgesicherten Zündungsplus verwendet. Nach nunmehr über zwei Monaten intensiven Testens ohne Ausfälle kann ich das Projekt als erfolgreich abgeschlossen ansehen. Eine kleine Anpassung muss ich noch vornehmen: Ich habe für die OBD Diagnoseschnittstelle ein Y-Kabel verwendet, damit ich weiterhin Diagnose betreiben kann und auch der TÜV Mann glücklich ist ohne immer alles auseinander bauen zu müssen, aber selbst wenn der Prozessor nicht mit dem Steuergerät kommuniziert, zieht der OBD USB KKL Adapter die K-Leitung auf ein festes Niveau. Da muss ich im Y-Kabel noch einen weiteren Schalter einbauen und dann sollte auch das gelöst sein (es kann nur ein Teilnehmer auf der K-Line senden / empfangen). Am Ende gibt es noch ein paar Fotos vom Umbau und der Anzeige in Aktion. Falls jemand Lust hat, das Ganze nachzubauen oder etwas ähnliches zu realisieren, kann ich gern behilflich sein und natürlich auch den Quellcode (noch etwas quick & dirty) und den Schaltplan teilen. Eins will ich nicht verschweigen: die Geschwindigkeitsdaten aus dem Steuergerät des FIS werden nur mit einer Genauigkeit von 2km/h ausgegeben, d.h. es werden nur gerade Geschwindigkeiten angezeigt (2,4,6 …). Aber das hat mich nicht gestört. Der Quellcode ist auch für die Kommunikation mit anderen Steuergeräten (Motor o.ä.) ausgelegt, allerdings dauert das Umschalten zwischen den Steuergeräten sehr lange und jedes Mal, wenn das Steuergerät des KI geweckt wird, erfolgt offensichtlich über den eingebauten Lautsprecher ein "Klicken" das nervt. Daher habe ich mich auf die dauerhafte Kommunikation mit dem KI-Steuergerät beschränkt (nur einmal Klicken beim Start) und muss daher auf Informationen zur GRA (z.B. Staus und gesetze Geschwindigkeit) verzichten. Das wäre dann wieder was für die CAN Bus Erweiterung ;-). Viele Grüße und danke an alle Vorarbeiter, von denen ich hier viel gelernt habe, Andreas




- 29 Antworten
-
- 22
-

-

-
Kommunikation mit Steuergeräten - KW1281
valereo antwortete auf valereo's Thema in Ausstattungen & Umbauten
Okay. Danke für eure Kommentare. Dann werde ich mich mal demnächst mit dem Thema CAN Bus mehr beschäftigen. Aber das wird dann ein Folgeprojekt bzw. eine Projekterweiterung. Erst einmal mache ich die jetzige Idee lauffähig. Beim Einbau hole ich mir dann schon mal die CAN Bus Leitungen vom KI.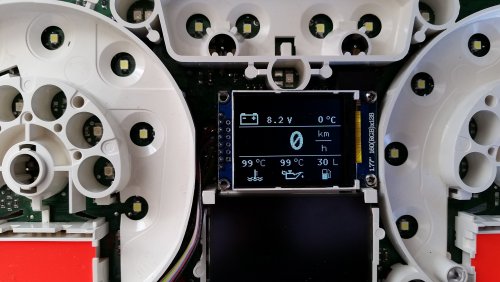

-
Kommunikation mit Steuergeräten - KW1281
valereo antwortete auf valereo's Thema in Ausstattungen & Umbauten
Hallo Artur, hallo Mankmil, danke für eure Antworten. Das hatte ich schon fast "befürchtet". Der Zugriff über CAN Bus klingt sehr gut, aber das ist dann wieder ein komplett neues Projekt. Eine kurze Suche zu dem Thema hat für mich ergeben, dass die Dokumentation der IDs und der dazugehörigen Informationen in den Bytes für CAN doch sehr überschaubar ist, oder habe ich da etwas übersehen? D.h. viel reverse engineering? Dank blafusel und der RossTech Label files ist der Zugriff über KW 1281 schon sehr gut dokumentiert. Bovor ich ein neues Projekt starte bzw. alles auf CAN Bus Kommunikation umbaue, würde mich eure ehrliche Einschätzung dazu interessieren. Wie schwer ist es an folgende Infos auf den CAN Bus Systemen zu kommen und diese auch zu interpretieren? 1. Kühlwassertemperatur 2. Öltemperatur 3. Geschwindigkeit 4. Tankinhalt 5. Motordrehzahl 6. Außentemperatur 7. GRA Status 8. GRA - eingestellte Geschwindigkeit 9. Batteriespannung Gibt es evtl. schon dokumentierte Projekte dieser Art? Danke. Andreas -
Hallo zusammen, ich arbeite gerade an einem kleinen Arduino Projekt bei dem ich in das Kombiinstrument ein zusätzliches Display einbaue und verschiedene Daten direkt von den Steuergeräten abrufe. Ich weiß, dass es da schon eine Menge Projekte gibt / gab, aber manchmal macht es einfach Spaß etwas eigenes zu basteln und nicht nur einzukaufen ;-). Nun zu meiner Frage: Die Kommunikation mit dem Kombiinstrument und dem MSG klappt problemlos. Da ich auf dem Display gern Daten aus beiden Steuergeräten abbilden möchte (z.B. Öltemperatur und GRA-Status), frage ich also ständig nacheinander beide Steuergeräte ab. Beim Kombiinstrument hört man beim Kommunikationsaufbau immer ein deutliches Klicken. Hört sich für mich nach einem Relais an. Kann das jemand bestätigen? Da ich bisher im Sekundentakt zwischen den Steuergeräten hin- und herschalte, kommen da eine Menge Schaltbelastungen für das Relais (?) zusammen. Weiß jemand, ob das auf Dauer ein Problem für das Kombiinstrument oder ein anderes Steuergerät darstellt? Eine geringere Aktualisierungsgeschwindigkeit als 1 Sekunde macht aus meiner Sicht nicht so viel Sinn, da ich z.B. auch den Status der GRA und die eingestellte Geschwindigkeit abfrage. Die Abfrage muss also relativ häufig erfolgen. Danke für eure Hilfe und viele Grüße, Andreas