A4Fan
-
Gesamte Inhalte
18 -
Benutzer seit
-
Letzter Besuch






Leistung von A4Fan
-
FIS auf Basis Arduino Mega - Projekt erfolgreich abgeschlossen
A4Fan antwortete auf valereo's Thema in Ausstattungen & Umbauten
@valereo basiert der Code auf den Code von „bla Fussel“ ? Beste Grüße -
FIS auf Basis Arduino Mega - Projekt erfolgreich abgeschlossen
A4Fan antwortete auf valereo's Thema in Ausstattungen & Umbauten
@valereo melde mich mit der Lösung zum „Y“ Kabel und Schalter für die K Line. Weitere Experimente an der K Line und am LIN Bus haben gezeigt dass der K Line PullUp Widerstand im Adapter für das DIY FIS entfernt werden sollte. Die K Line wird vom Gateway, wie der LIN Bus Master, bereits auf High gehalten. Der zweite Widerstand im K509, idR 510 Ohm, tut das Gleiche. Der Transceiver schafft es die K Line auf Low gegen zwei PullUp WS zu ziehen, gegen drei WS jedoch nicht mehr. So kann der FIS Adapter permanent angeschlossen bleiben und die die OBD / K Diagnose läuft ungestört. Über den Code können, während der Kommunikation mit dem Diagnosegerät, die Anfragen vom DIY FIS ausgeschaltet werden, wenn es zu Interferenzen kommen sollte. Alternativ kann der Code für das DIY FIS so adaptiert werden dass „externe“ Anfragen als „Diagnose Modus“ erkannt werden und Anfragen vom DIY FIS, solange dieser Zustand anhält, nicht erfolgen. Gruß -
FIS auf Basis Arduino Mega - Projekt erfolgreich abgeschlossen
A4Fan antwortete auf valereo's Thema in Ausstattungen & Umbauten
Hallo @valereo habe am Projekt FIS weiter gearbeitet und kann auf die K fast verzichten. Es fehlt noch der Ladedruck und die Intake Temperatur. Die Gangazeige ist in der Version 2 gut gelungen, Diese lässt sich wie folgt realisieren : Die Drehzahl und der Schalter vom Kupplungspedal kommen über die PID 0x280 vom MSG. Speed kommt über die PID 0x320 vom KI. Die beiden PID kommen sehr häufig. Die Übersetzung wird aus der DZ und Speed errechnet wenn die Kupplung zu ist, beim Wechsel des Bit- Kupplung von 0 auf 1 und Speed !=0. Essentiell ist dass ein Zeitfenster, zB 100 Millis, definiert wird in dem die Werte DZ und Speed erfasst werden. Die Werte müssen dicht beieinander sein sonst passt die Ratio nicht. Die Ratio für jeden Gang ermittelt man indem man in jedem Gang mit zB 2000 rpm fährt Und die jeweilige Geschwindigkeit aufschreibt. Das ergibt 5 Sollwerte für Ratio. Diese liegen für den A4 1.9tdi zwischen 100und 21. Der Wert 27für den 4. Gang definiert man als 25- 29 um die Zeitverzögerung zwischen den PIDs auszugleichen. Passt der Wert keiner Definition, wird dieser erneut berechnet. Die Einstellung der Werte erfordert etwas Geduld. Je enger die Ratio definiert ist desto besser die Ergebnisse. Man kann auch Filter für den Canbus setzen und, wenn der Code es erlaubt, ISR einsetzen. Die Daten: PID280; Byte 2 und Byte 3 DZ = (256*byte3+ byte2)/4 byte0 -Bit3 = Kupplung PID 320; Byte3 und Byte4 Speed = (256*byte4+byte3)/200. Die Daten passen zu unseren A4 1.9 tdi bj 2000 und A6 2.5tdi bj 2004. der Polo von 2011 ist ähnlich gestrickt. Beim A4 bj2008 und Q7 bj 2009 sind es andere PID. Es kann gut sein das die PID zum A2 passen. Gruß -
Anpassung Gehäuse/Abdeckung Fuß. Von unten ist es nicht so toll aber auch nicht direkt sichtbar... Wenn das Alignement vorne nicht steht muss die Arretierung komplett neu gemacht werden.



-
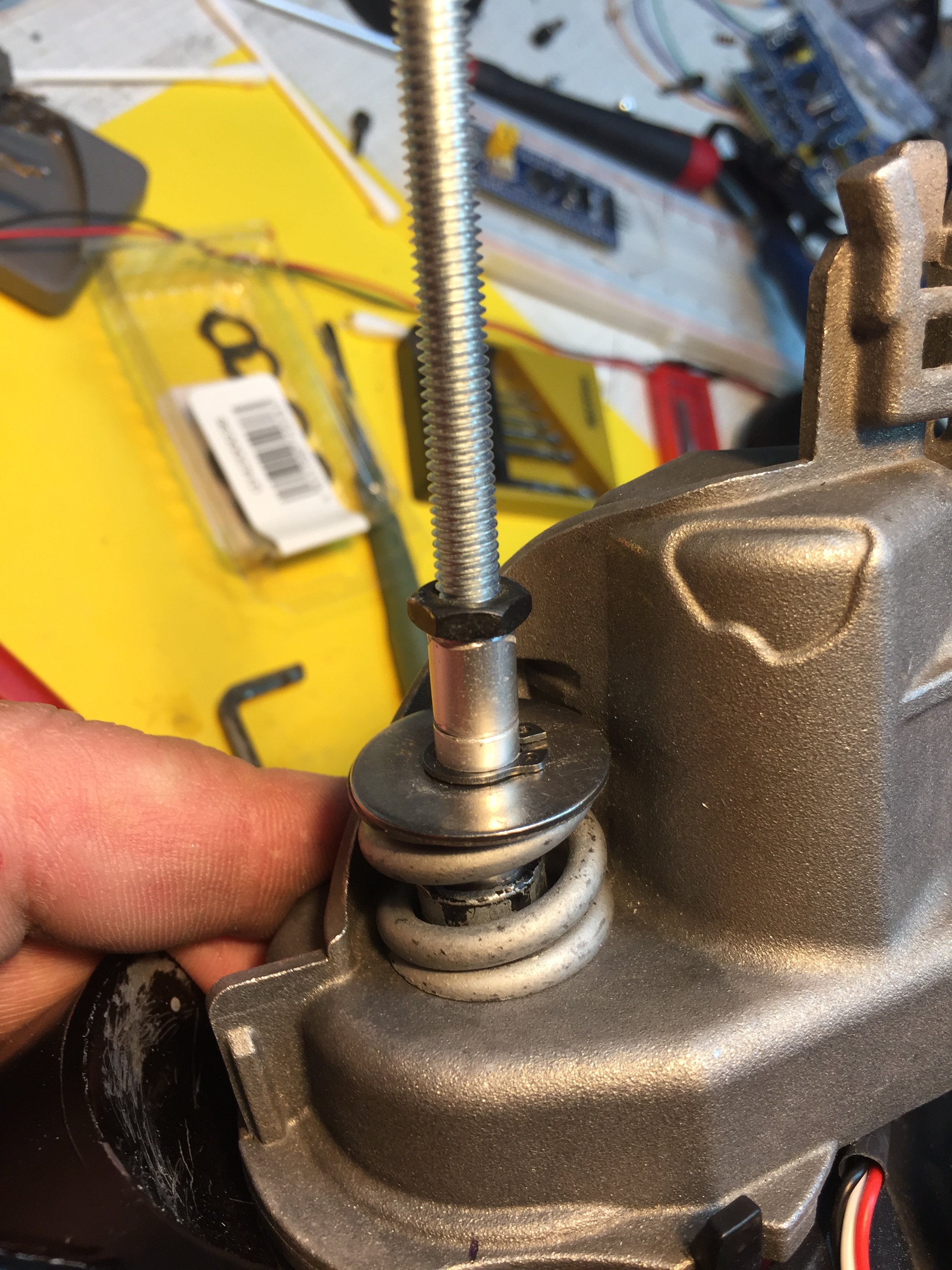
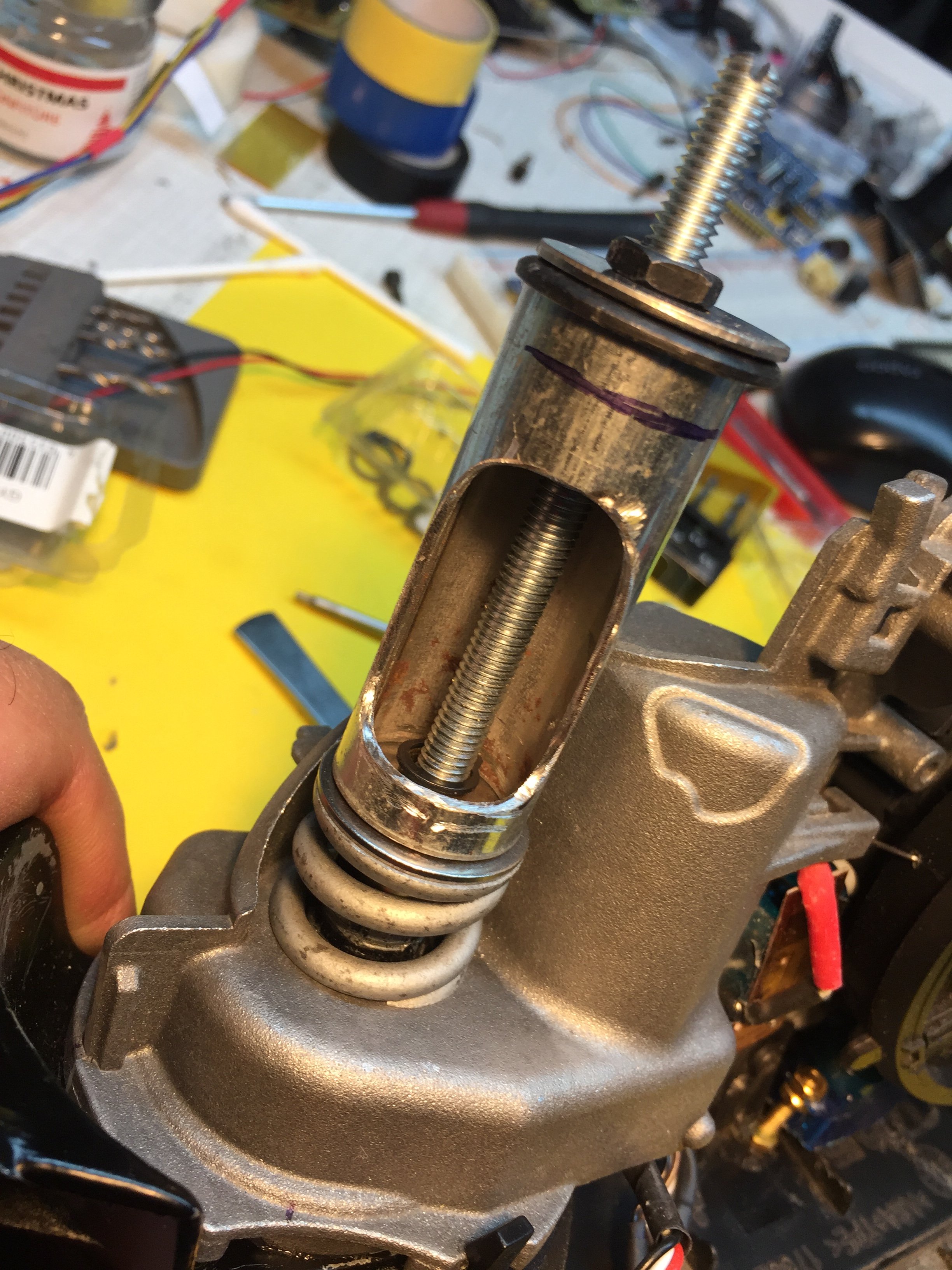
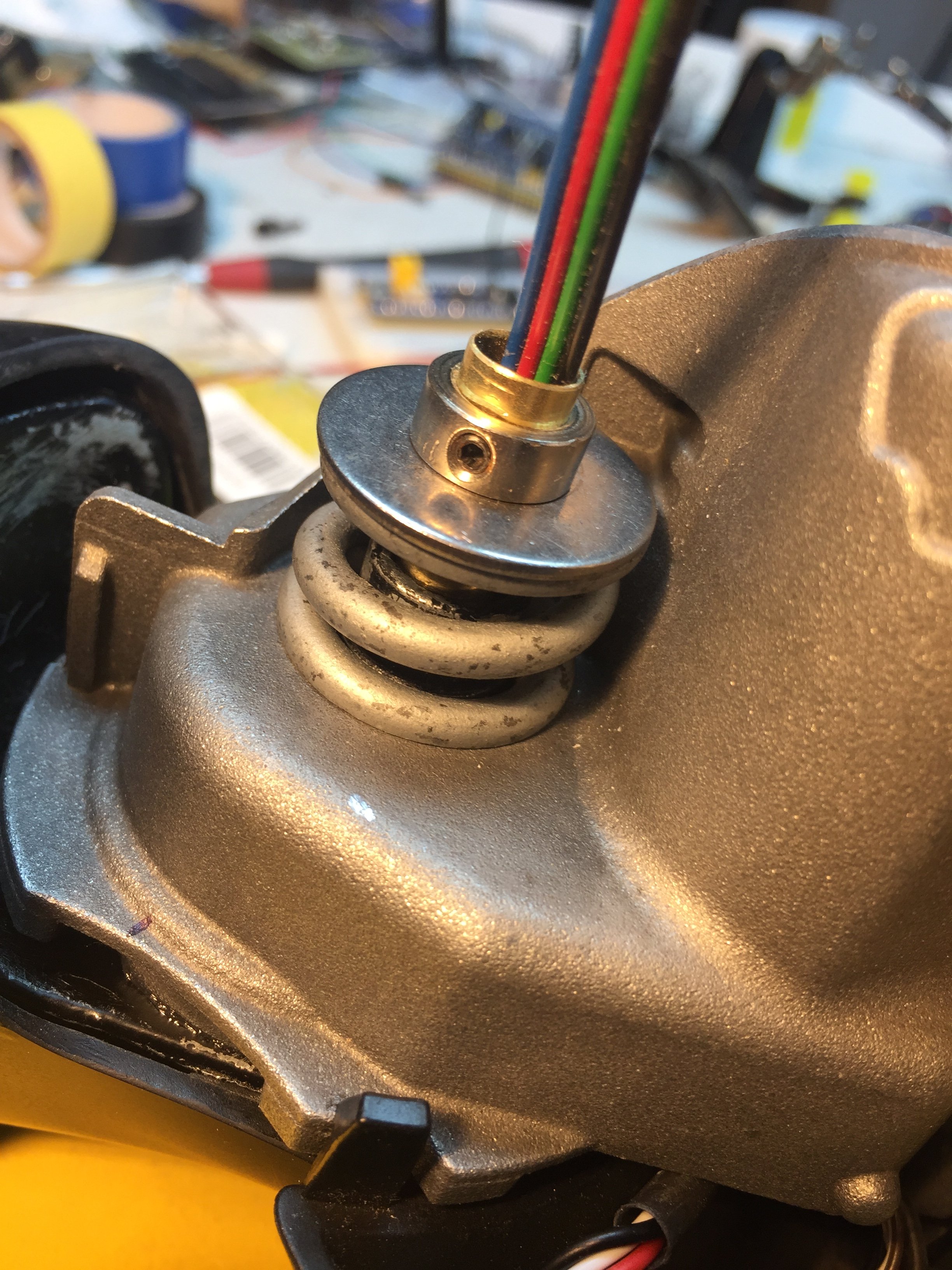
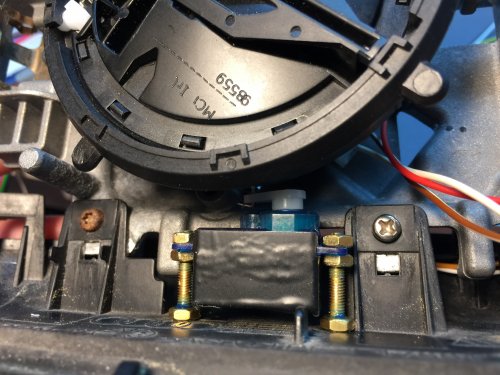
Anpassung Spiegel/Fuß in zwei Varianten. Der Stellring mit Madenschraube ist besser, stabiler und die Spannung der Feder kann besser eingestellt werden. Wenn diese passt wird ein Loch in das Röhrchen gebohrt für sicheren Halt.












-
Externer Anschluss und Ansteuerung über FIS



-
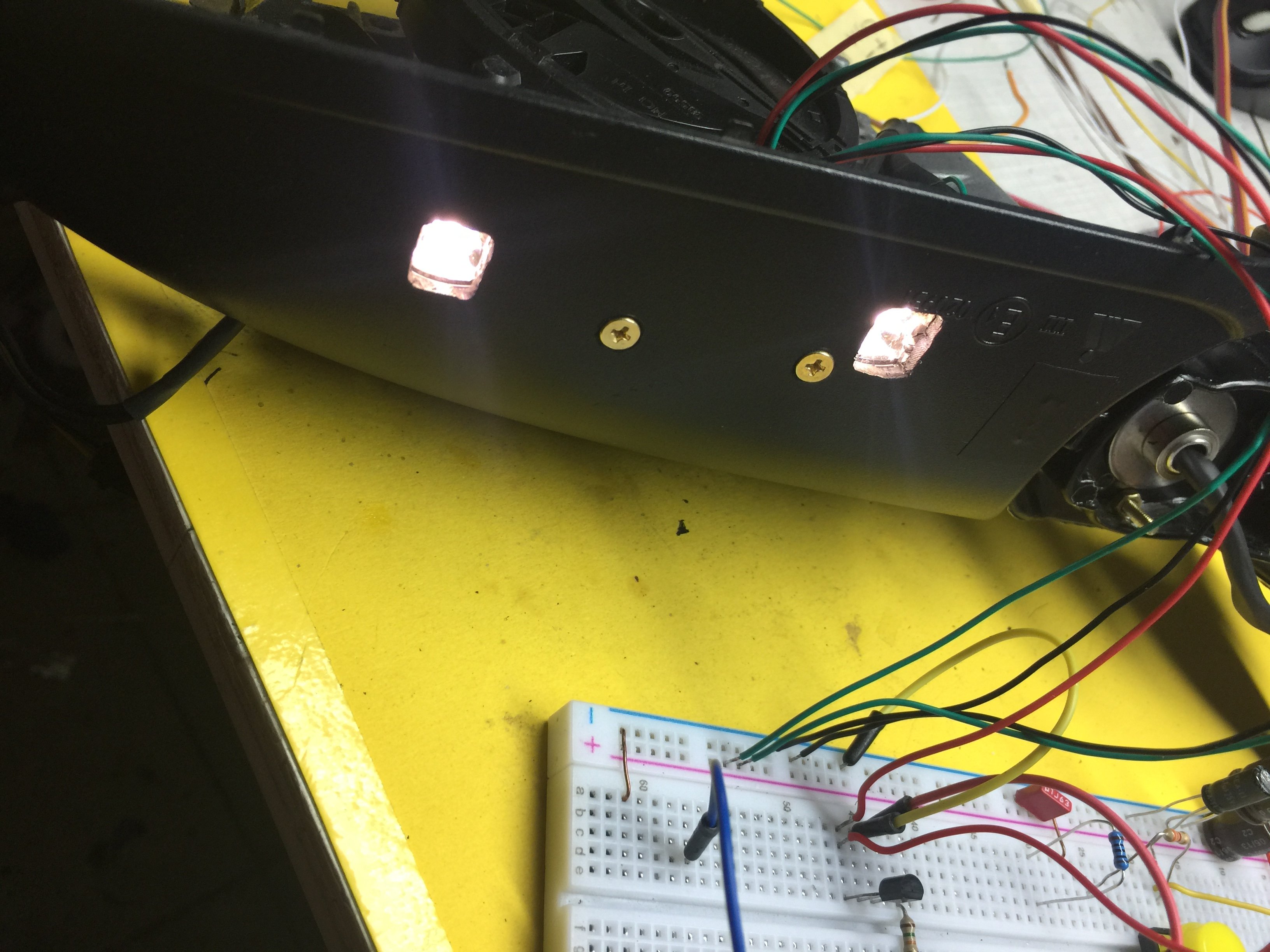
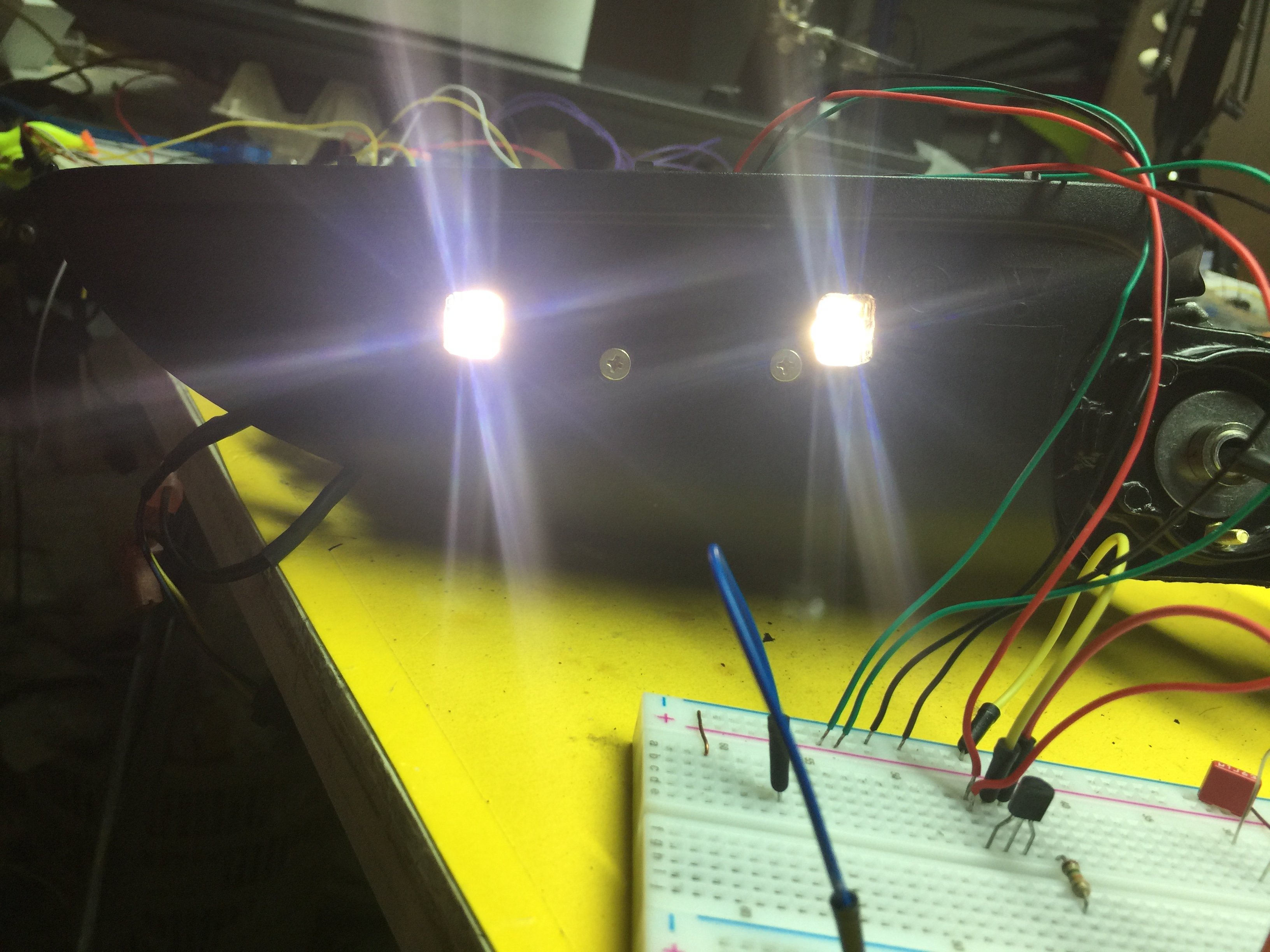
Unterschied Dimensionen Original Spiegel A4B5 und B8, LED Blinker und Umfeld

-
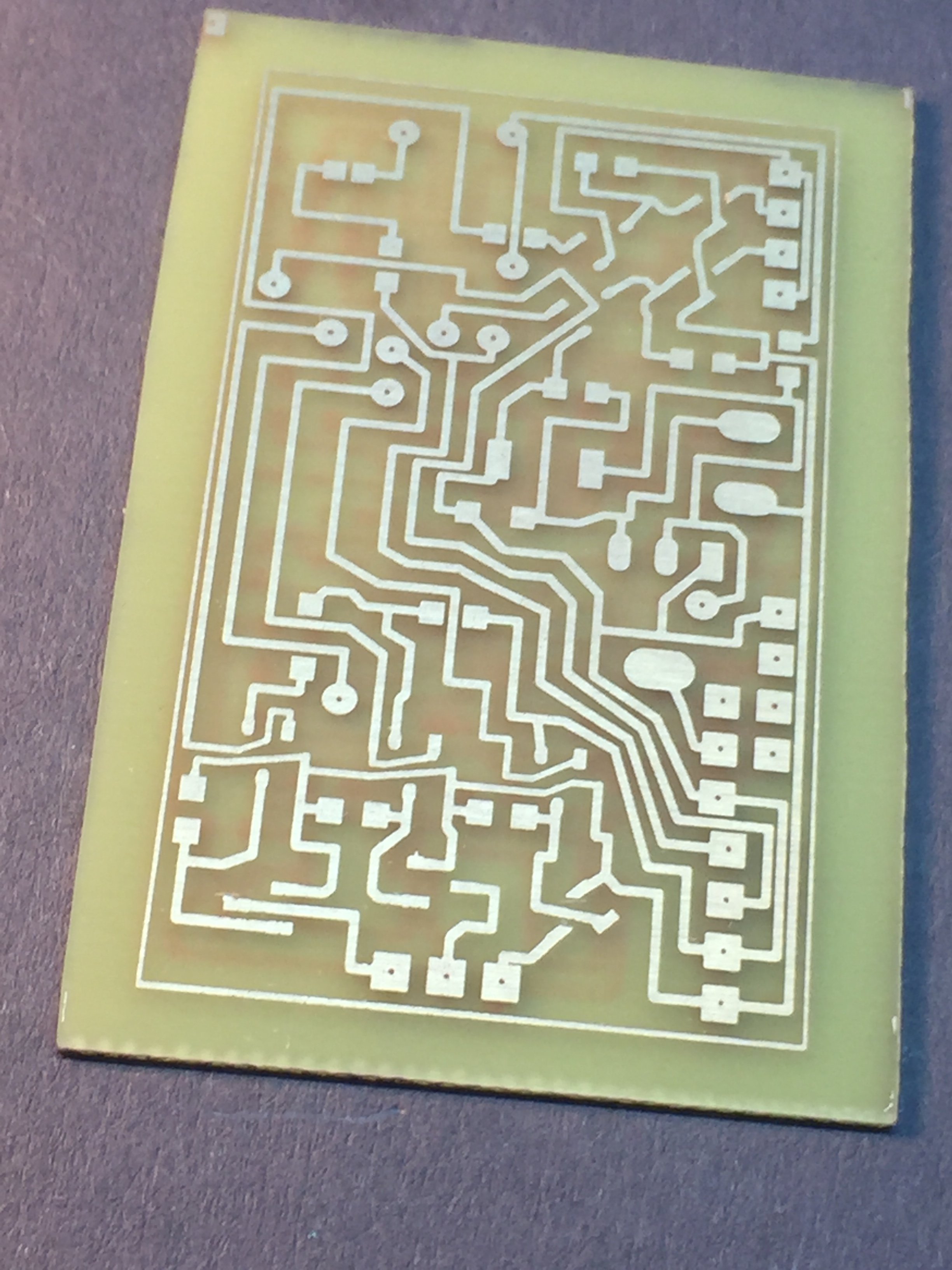
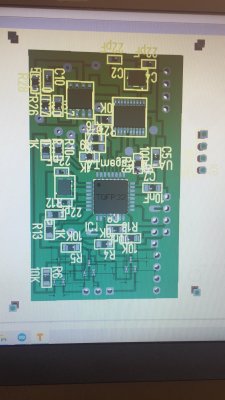
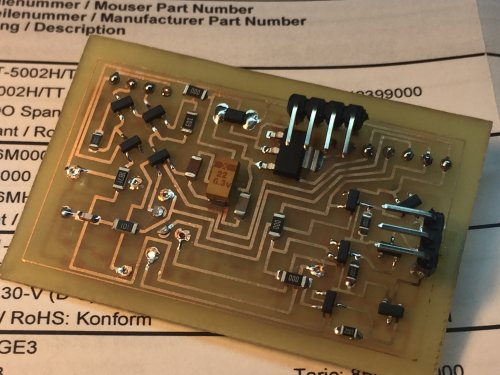
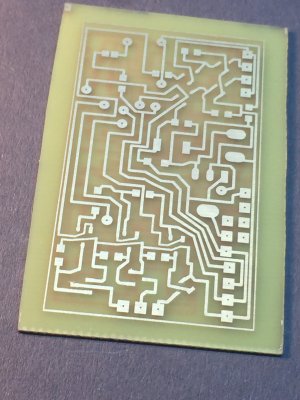
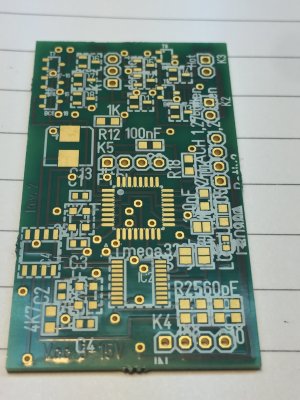
Die Elektronik: Prototypen, Platine etc pp




-
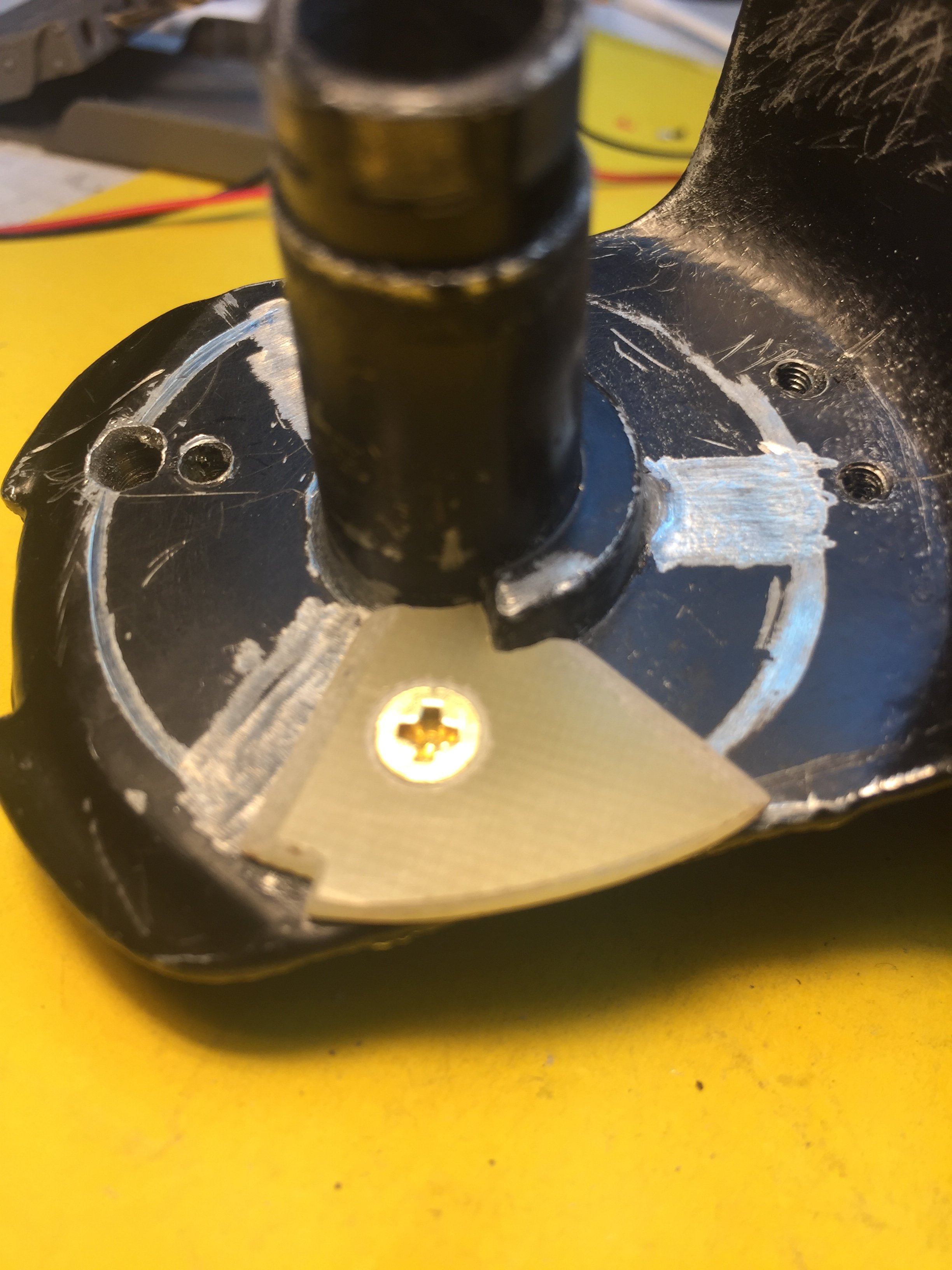
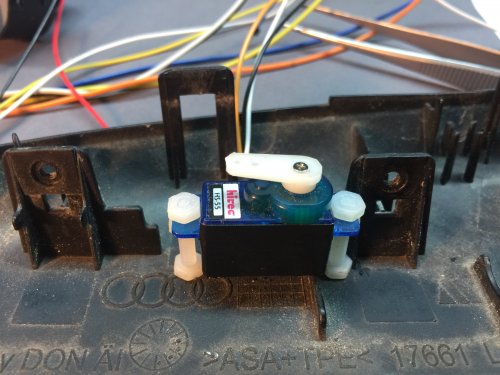
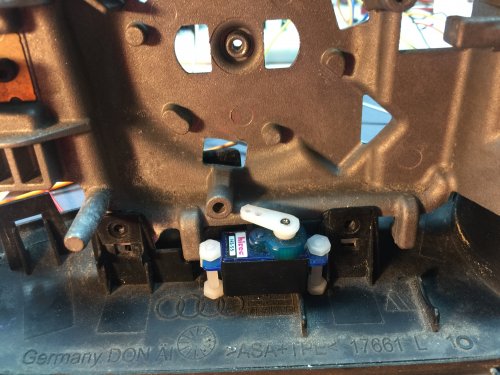
Die Potentiometer:



-
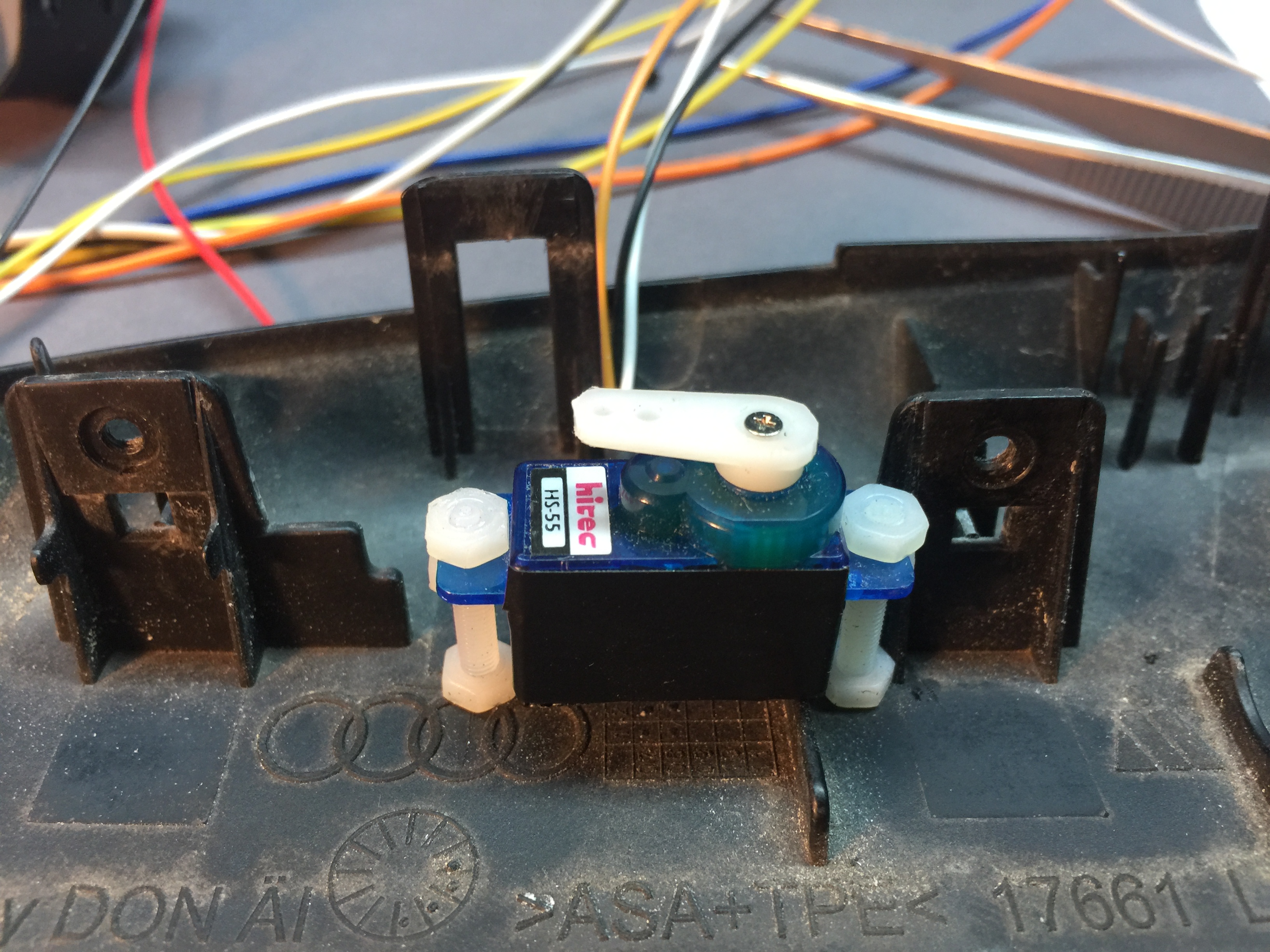
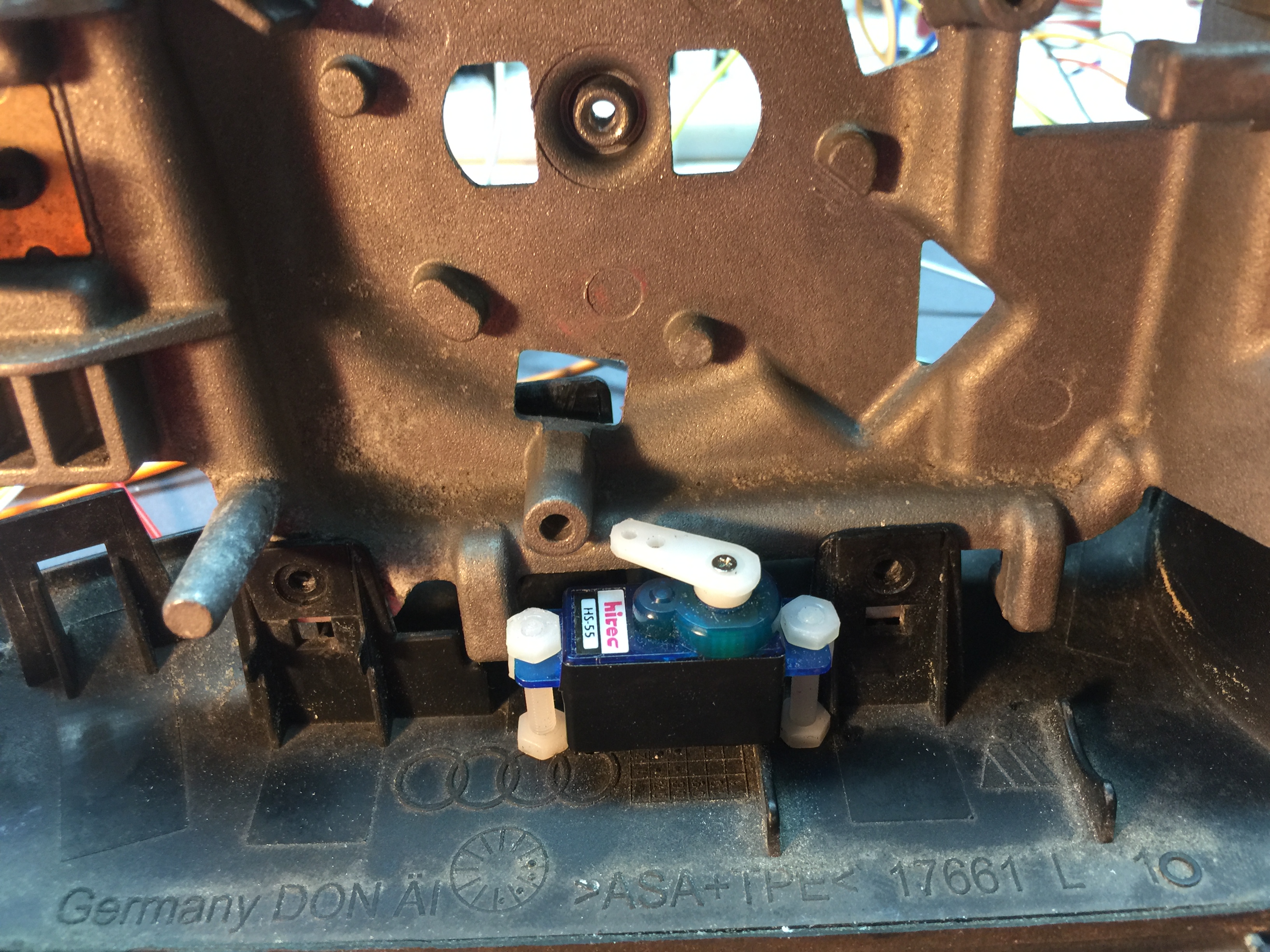
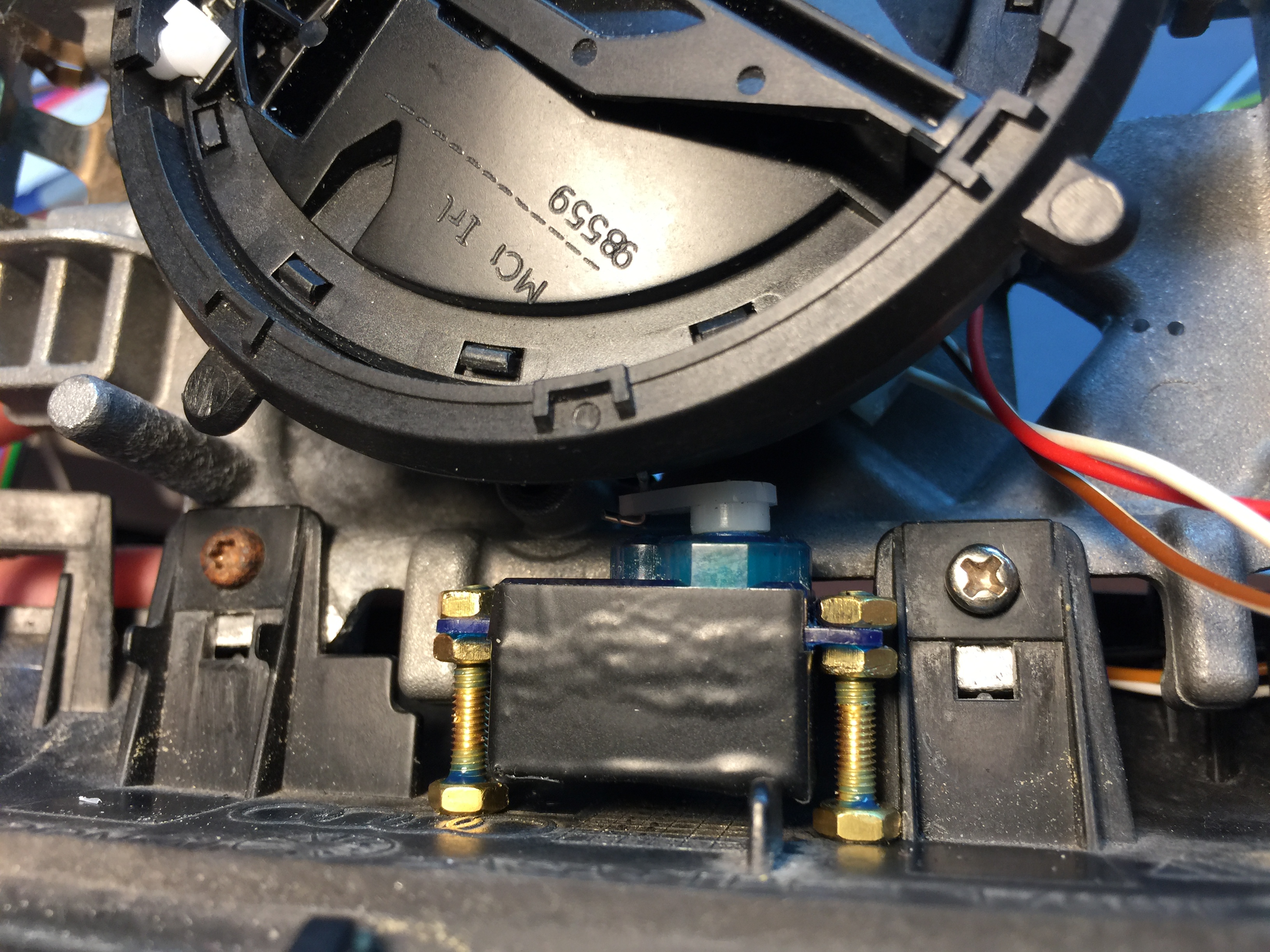
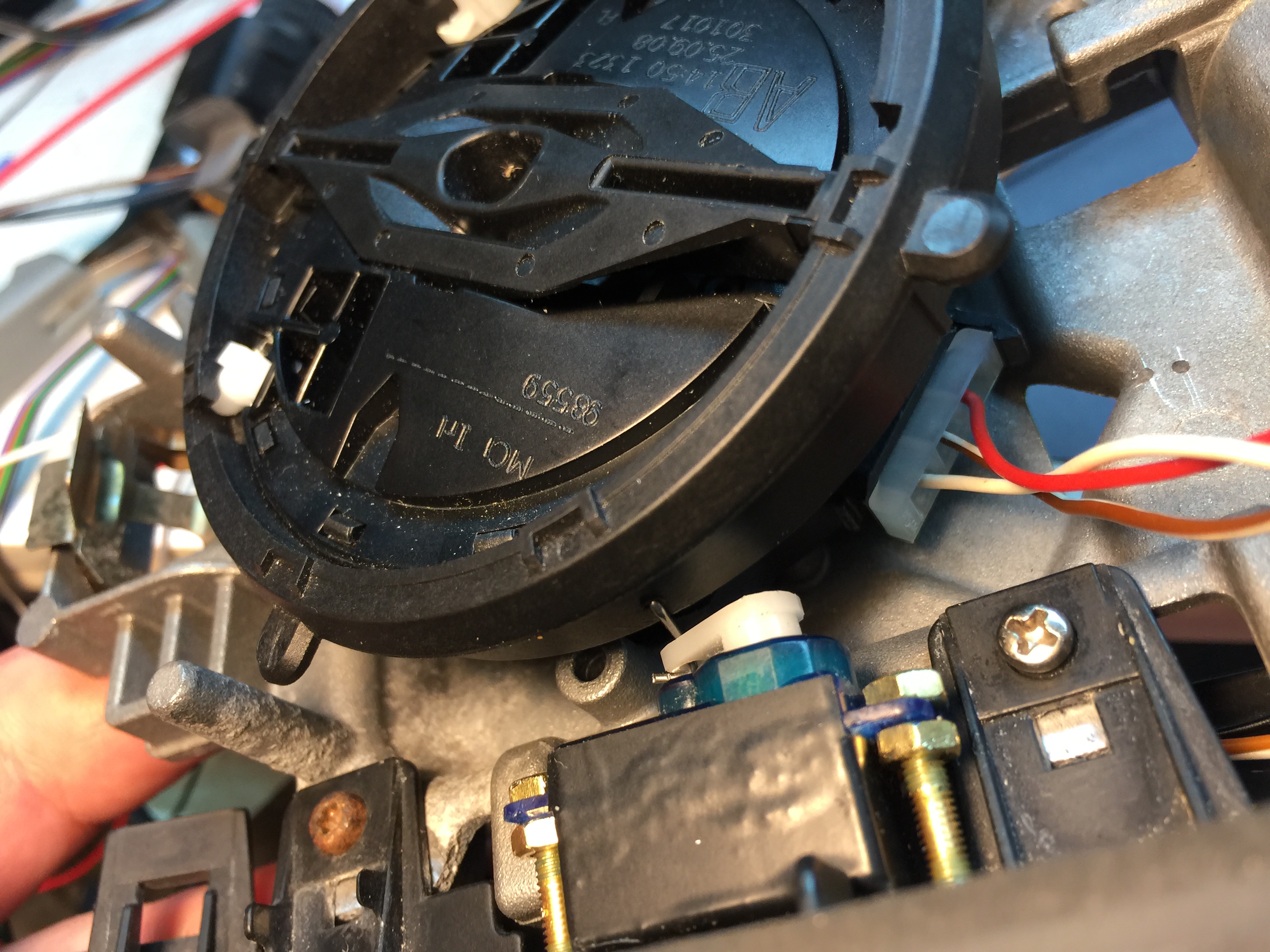
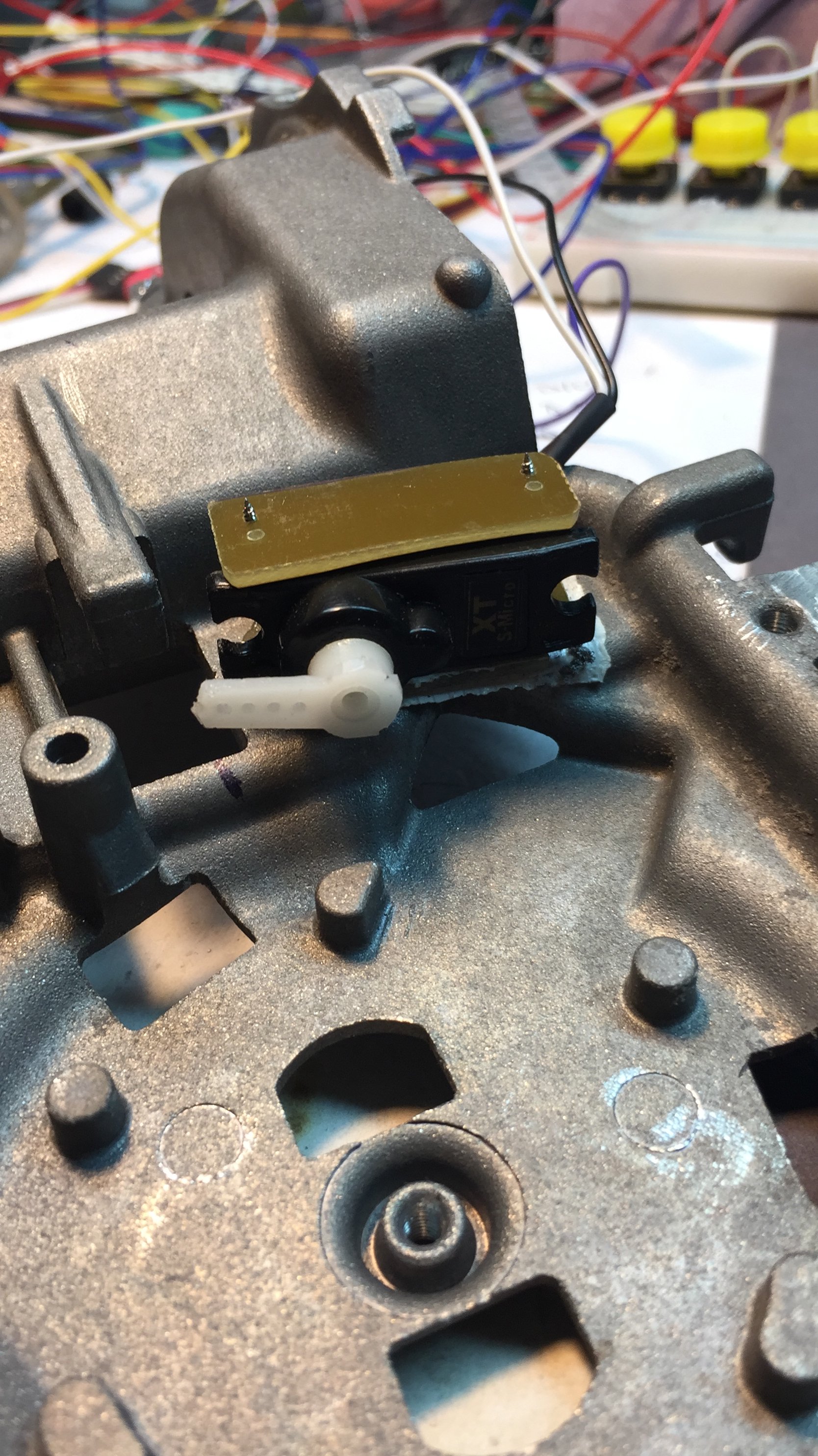
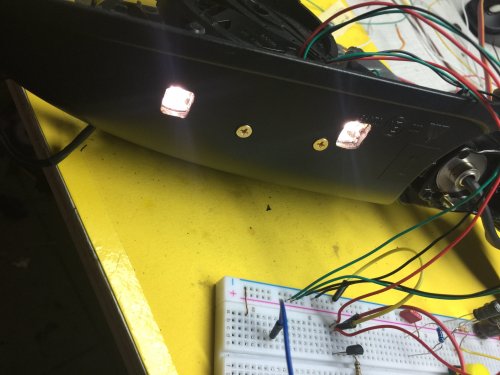
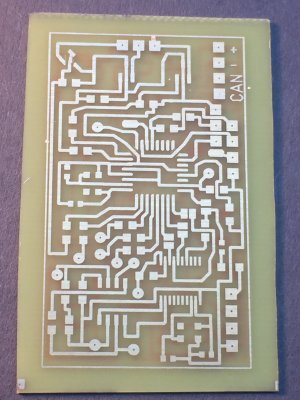
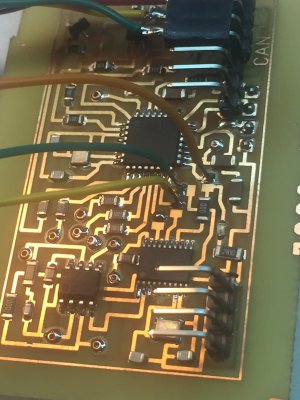
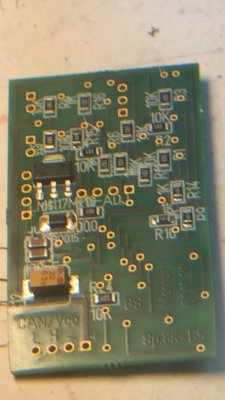
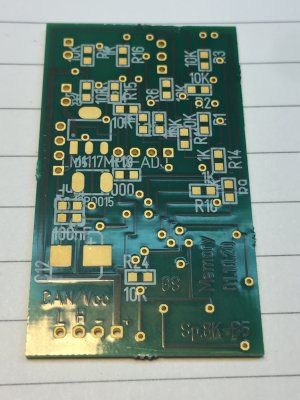
Hallo zusammen, Mir sind 2 intakte Spiegel ( normale Ausführung, el. verstellbar und beheizbar mit integrierten Blinker) aus einem kaltverformten Audi A4 B8 in die Hände gefallen. Dazu noch die kaputten Scheinwerfer, Xenon, deren LED Kette für TFL noch funktionieren. Damit habe ich das Projekt Memory Spiegel gestartet. Die Spiegel passen nicht zum A4B5 aber... was nicht passt wird passend gemacht! Das Problem der Positionsbestimmung musste durch Anbringen von 2 Potentiometer, X und Y Achse. Dafür wurden je 2 Servos, 9 Gramm, genommen und umgebaut. Das Getriebe, der Motor und die Elektronik wurden entfernt. Das Gehäuse wurde entsprechend gekürzt, das 180 (200) Grad Potentiometer mit drei Leitungen versehen, der Raum für das Getriebe mit Schmierfett aufgefüllt, der Untere Teil um das Poti herum mit Silikon Heisskleber aufgefüllt und dicht gemacht. Der Servoarm wurde passend gekürzt und mit 0,5 mm Stahldraht an den Verstellmechanismus angeschlossen. Die Positionierung der Potis am Spiegelgehäuse und die Anpassung der Anlenkung muss sorgfältig vorgenommen werden um den Weg des Poti optimal/ maximal auszunutzen, ohne dass das das Gestänge den Bewegungsumfang der Mechanik beeinträchtigt. Somit ist eine Auflösung von bis zu 1000 Schritte pro Achse zu erreichen. 1023 wäre optimal. Die Motoren sind in Serie geschaltet und haben drei Anschlüsse. Für die Ansteuerung wurde eine 1,5 fache H- Brücke mit 6 MosFet gebaut. Die Heizung zieht ca 900 mA bei 14,0V und wird ebenfalls über ein MosFet über PWM angesteuert. Der Blinker, eine LED mit Lichtleittechnik, wird ebenfalls über Ein MosFet angesteuert. Da der A4B5 bereits einen Seitenblinker im Kotflügel hat wurde die Nach außen sichtbare Leiste schwarz lackiert um Diskussionen mit der Rennleitung (D) aus dem Weg zu gehen. Das Ende der Lichtleiste am inneren Rand des Spiegels ist offen. Die LED des Spiegelblinkers wird für den „Toter Winkel Assistent“ genutzt ( je 2 PDC in der Heckschürze integriert, Reichweite ca 4,5 m). Den braucht kein Mensch aber wenn man schon bastelt dann richtig... Am unteren Teil vom Spiegelgehäuse wurden je 2 LED vom TFL des B8 mit Lupe, Konfiguration weiß, integriert. Diese werden als Umfeldbeleuchtung über je ein Transistor angesteuert. Die Elektronik besteht aus je einem MC ATmega 328 und Arduino proMini 5V/16MHz mit CANBUS. Das Platine ist im Spiegel im Gehäuse für den Motor für el. anklappbare Spiegel untergebracht. Die Komponenten sind für den Temperaturbereich Automotive, die Platine mit Klarlack lackiert. Die MosFet für 7,5 A ausgelegt um jegliche Hitzeentwicklung zu vermeiden. 6x digital Output für die H Brücken, je einer für den Blinker und die weißen LED, ein Digi PWM für die Heizung. Die Prototypen für die Platine stellt man am besten selber her. Wenn alles passt, herstellen ( PCB Hersteller aus Holland) lassen wegen der Durchkontaktierungen. Drei Platinen, ca 18€. Jeder Spiegel hat 4 Leitungen, plus, minus CANBUS H und CANBUS L. Der Knopf für die Verstellung wurde beibehalten. Der VorWS für die rote LED wurde geändert um den Button mit 5V zu betrieben. Die Signalpins vom Button müssen mit Spannungsteiler auf 1/2Vcc gehalten werden und analog ausgelesen werden um die einwandfreie Selektion X/Y; li/re zu bekommen. Der Knopf vom B8, Joystick mit Drehschalter, gibt die Signale über 2 Leitungen aus und ist wesentlich angenehmer und einfacher, findet jedoch keinen Platz unter der Verkleidung der Fahrertür. Die Ausgänge vom Button sind, nebst original Leitung für die Spiegelheizung, ZV und Innenlicht, an einem ATMEGA 328 mit CANBUS angeschlossen. Der CANBUS ist unter anderen am FIS und PDC angeschlossen. Die Leitung vom R-Gang Schalter ist am FIS angeschlossen und gibt die Info über CANBUS an die Spiegel. Über das FIS wird beim Start einer von 4 Fahrer gewählt. Erfolg eine Verstellung der Spiegel, wird die neue Position im Eeprom der betreffenden Seite , als Update, gespeichert. Wenn der R-Gang eingelegt wird bewegen sich die Spiegel nach innen und nach unten. Jeder Fahrer kann diese Position ändern. Diese wird ebenfalls gespeichert. Die Endpositionen müssen exact getestet werden und sind ebenfalls im Eeprom abgelegt. Eine Verstellung darüber hinaus ist nicht möglich. Die End zu End Verstellzeit für jede Achse wurde bestimmt und mit einem Zuschlag von 10% im Eeprom abgelegt. Sinn ist es dass wenn die Ränder Von Gehäuse vereist sind und der Bewegunsumfang des Spiegels eingeschränkt ist, die Verstellung abgebrochen wird. Sämtliche Werte können über CANBUS abgerufen und angepasst werden. Die Spiegel sind quasi voll Diagnosefähig. An der Unterseite ist noch ein FTDI Anschluss angebracht und die Software ändern zu können. Der Umbau wäre auch für die originalen Spiegel möglich gewesen allerdings hätte die Elektronik keinen Platz im Spiegel gefunden. Etwas komplizierter hat sich die Anpassung des B8 Spiegels an den B5 Fuß gestaltet. Die Arretierung am Fuß musste entfernt werden und im passenden Winkel neu gebaut werden sodass die Spiegel ein und ausgeklappt werden können, einen sicheren Halt in der ausgeklappten Position haben und auch nach vorne umgeschlagen werden können. Bei der Passgenauigkeit der Verkleidung des Fußes zum Gehäuse gibt es Abzüge in der B Note... ich kann aber damit leben. Eine gute Lösung ist es zwei neue Spiegel zu kaufen (30-35) und einen gebrauchten Button. Für den Umbau muss man Ruhe und Zeit haben. Wenn der Spaß am Bauen im Vordergrund steht ist die Frage nach dem Preis fast bedeutungslos... Schaltpläne, Target 3001, stelle ich für Interessenten gerne zur Verfügung. Gruß aus Bukarest
-
FIS auf Basis Arduino Mega - Projekt erfolgreich abgeschlossen
A4Fan antwortete auf valereo's Thema in Ausstattungen & Umbauten
Für die genannten Werte folgende PID im CANBUS Train prüfen: Tankinhalt auf den Liter genau bis min 8 l PID 0x320 Byte 2 unter 8 l Wert 159 und Tankwarnung an: PID 320 Byte 0 Bit 2 = 1 Oel Temperatur wenn LL Sensor vorhanden PID 0x420 Byte 3 - 60 Gruß -
FIS auf Basis Arduino Mega - Projekt erfolgreich abgeschlossen
A4Fan antwortete auf valereo's Thema in Ausstattungen & Umbauten
Das mit der Einstellung der Zeiger habe ich auch gemacht, im Stellgliedtest mit CarPort. Für den A4 gibt es 2 KI. VDO und Magneti Marelli. Das MM KI lässt sich sauber einstellen. Mittelstellung 3000 rpm und 100 kmh, die Zeiger stehen auch sauber auf 0. Beim VDO geht es nicht . Entweder stehen die Zeiger sauber auf 3000/100 und dann beide unter 0 oder sauber auf 0 und dann auf 3000+ und 100+ Eine Frage zu deinem A2: hat der einen Komfortblinker? Gruß -
FIS auf Basis Arduino Mega - Projekt erfolgreich abgeschlossen
A4Fan antwortete auf valereo's Thema in Ausstattungen & Umbauten
Saubere Arbeit! Glückwunsch ! Das „Klicken“ nach dem Init der K finde ich nicht schlecht. Es bestätigt die Initialisierung. Zu dem Delay : ich Initialisiere die K bei Zündung ON und frage in jeder Loop irgend einen Wert (Coolant) ab auch wenn dieser nicht gebraucht wird. Wenn zwischen wenn Abfragen nicht mehr als 1100 ms liegen bleibt die Verbindung zur K erhalten. Die K Leitung muss ich auch mit einem Schalter unterbrechen um die Kommunikation mit einem externen Diagnosegerät zu ermöglichen. Wie gross ist die Abweichung zwischen Tacho und dem Wert der K ? Bei meinem A4 sind es +9 kmh bei 100 kmh. Beste Grüsse -
@Daniel82 Hallo, zunächst einmal musst Du den CANBUS im A2 abhören und die PID entziffern. Dafür reicht ein Arduino Mega und ein Shield mit SD Card. Wenn Du diese hast dann einzeln als .csv Datensatz auf SD speichern und analysieren. Wenn Du reproduzierbare Ergebnisse hast kann ich Dir einen Adapter für die K Line zur Verfügung stellen. Es braucht aber den Mega wegen der Seriellen Kommunikation mit dem Laptop zur Darstellung der Werte. Hier ist jedoch die Frage zu klären ob dein A2 das J533 STG hat ! Über die K Line kommt, auf einfache Abfrage, außer Ladedruck bzw. Unterdruck im Ansaugtrakt und Temp nach Ladeluftkühler nichts spektakuläres ( km/h, DZ, Motortemp., Stellung Gaspedal, Luft g/s, ZZP...). Gruß
-
Hallo Martin, Ja, es ist mir bekannt dass es das Color MFA in viele Varianten gibt ! Grüsse nach Braunschweig. Hallo Daniel, für die hier vorgestellte Variante braucht man einen Arduino Mega, ein 2,8“ TFT, einen CANBUS Shield und diverse Sensoren. Der Adapter für die K Line muss gebaut werden. Die Pläne und den Code stelle ich gerne zur Verfügung. Foto 1-3 vom ersten FIS. Zur Zeit arbeite ich an der Version 2. Foto 4-6. Diese ist etwas komplexer und kompakter als die erste mit mehr Infos. Die Hauptplatine ist im KI untergebracht und die Anzahl der Leitungen wurde auf 9 (SPI , I2C, CANBUS und K) reduziert sodass ein SubD 9 Stecker zum externen Arduino Due ausreicht. Weitere Informationen folgen. Gruß